Integration examples¶
Transparent Tunnel¶
In this example, a transparent tunnel will be created using Smart CAN Isolator. The result will be that any messages received on Interface A will be sent through Interface B. Optionally, the mailboxes can be equally distributed to support both standard and extended CAN IDs.
In order to do this we will need to:
Create a new mailbox entry for Interface A. Assign half of the mailboxes to it and set a Mask of 0.
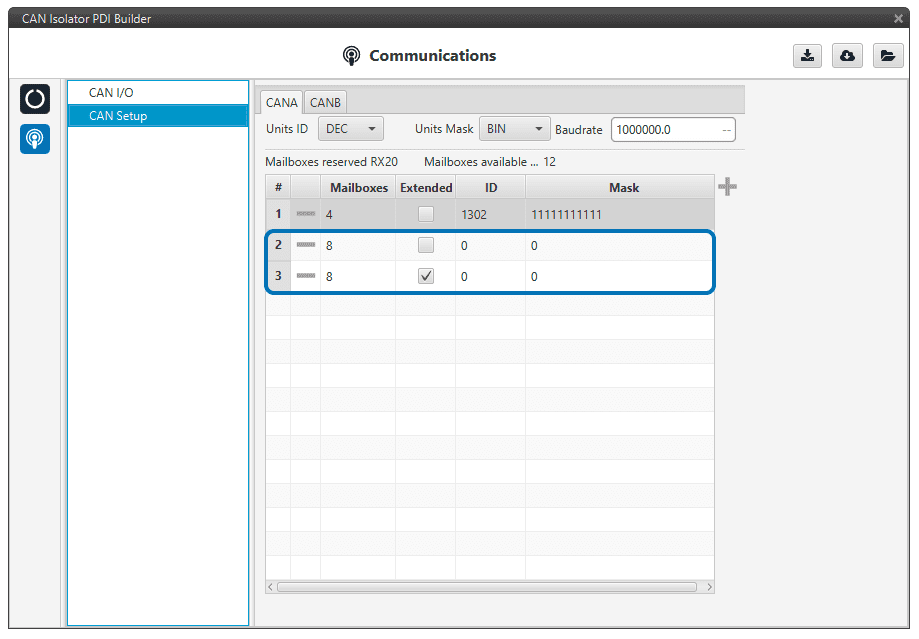
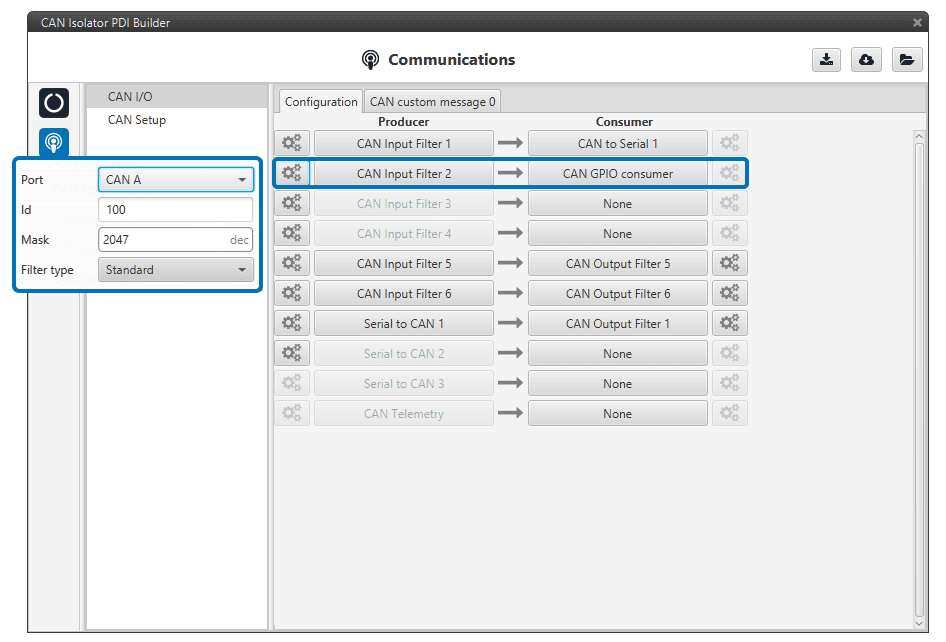
Configure CAN Input Filter 2 on CAN A, with a Mask of 0 and Both types.

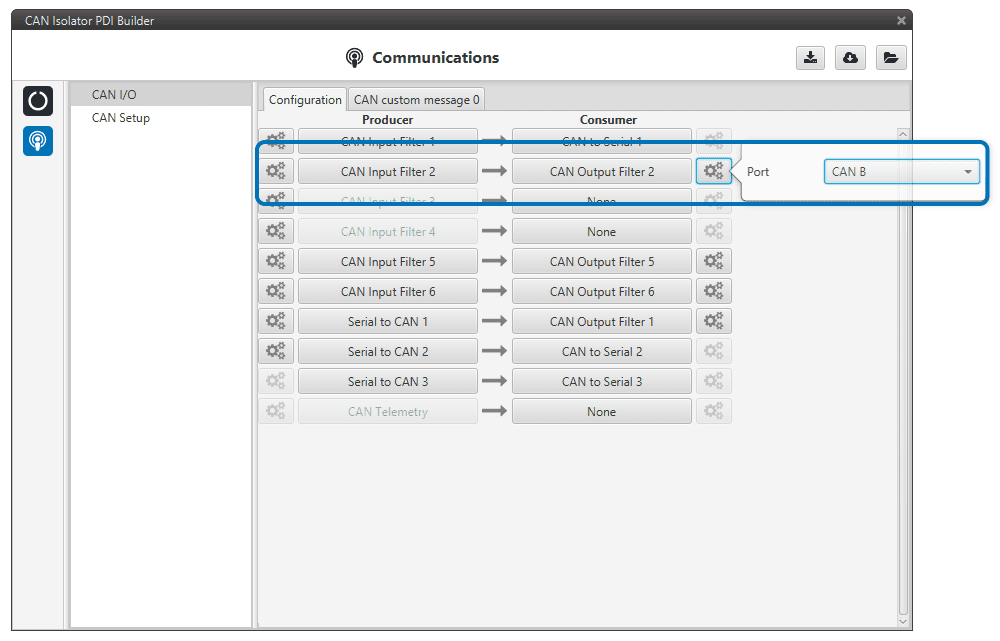
Bind CAN Output Filter 2 to CAN Input Filter 2, configured to CAN B.
CAN filter¶
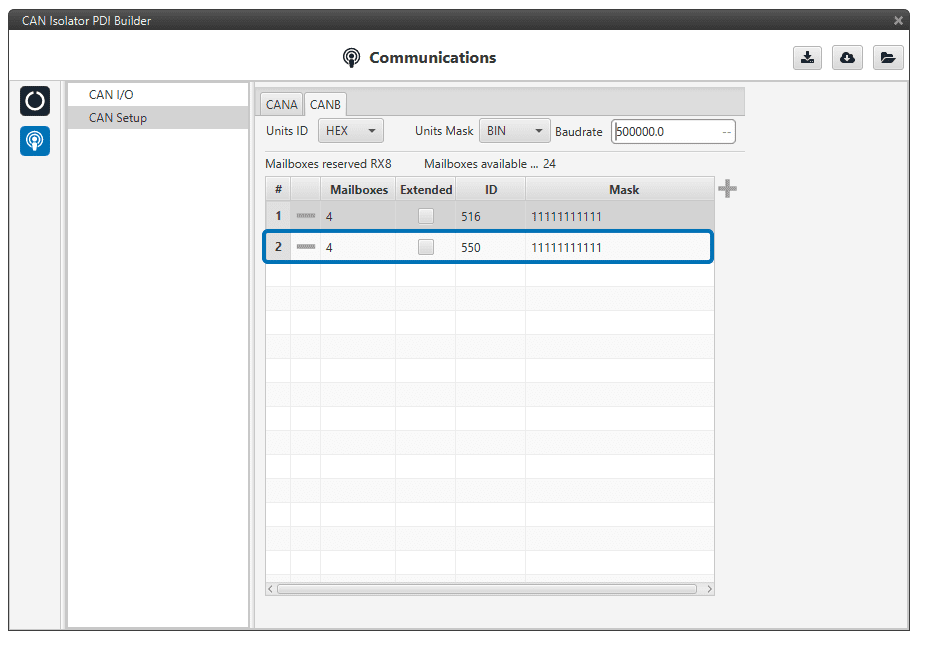
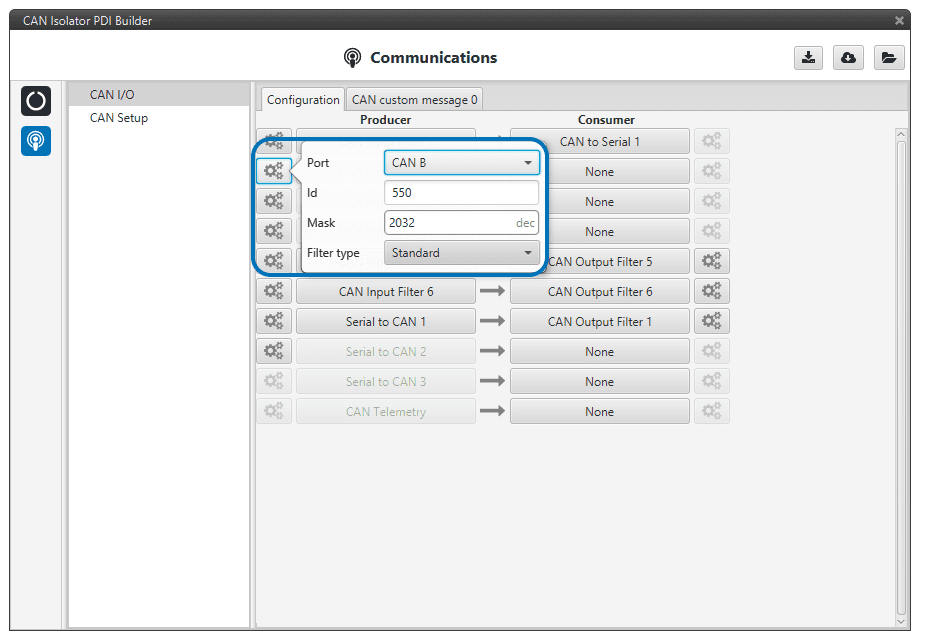
In this example, only a certain range of CAN IDs will be allowed to cross from Interface B to Interface A. The allowed range will be from 0x550 to 0x55F.
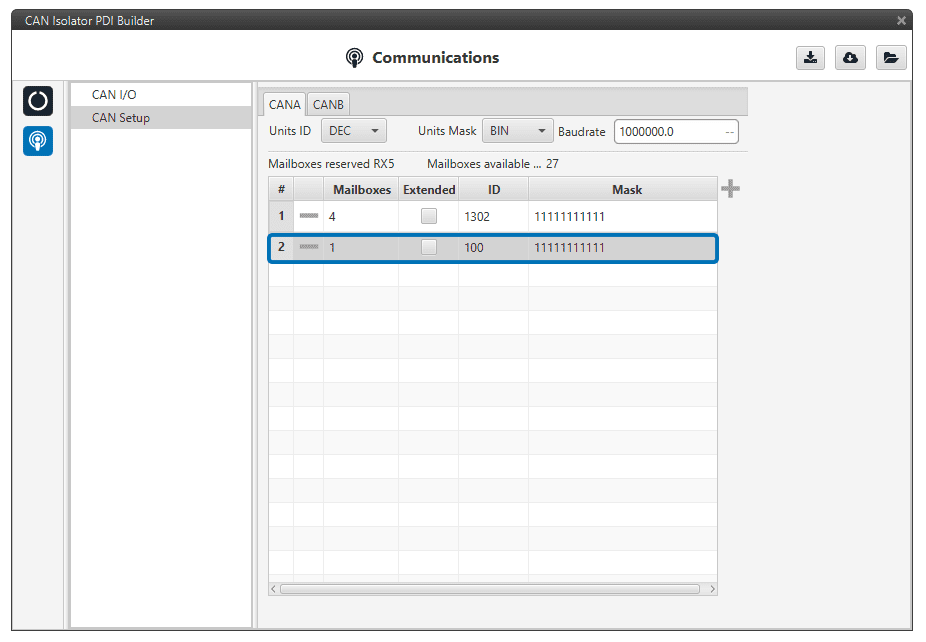
Create a new mailbox entry for Interface B. Assign some of the mailboxes to it and set the ID to 0x550.
Set a Mask which will ignore the last 4 bits.
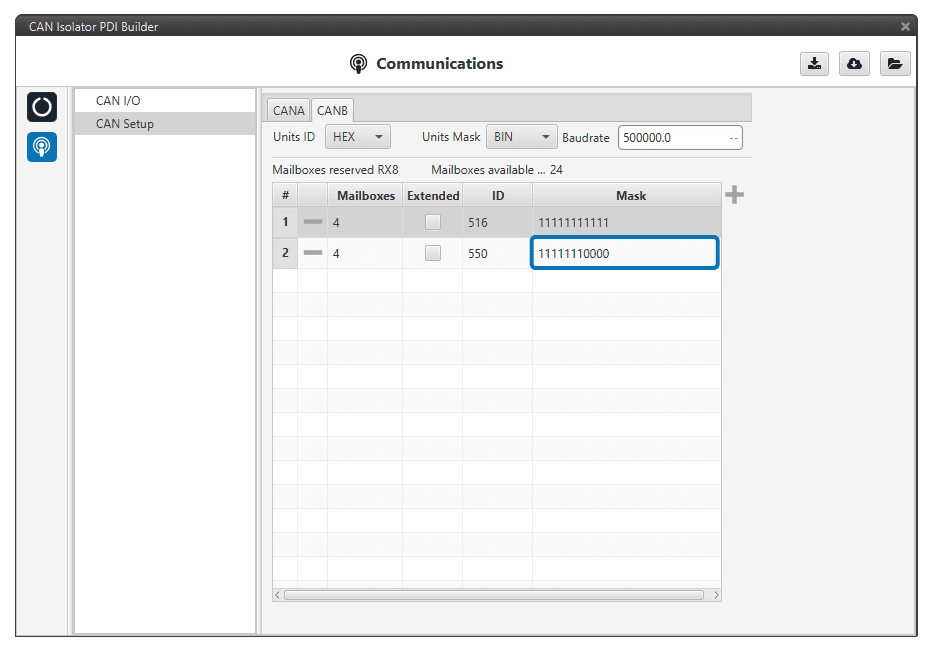
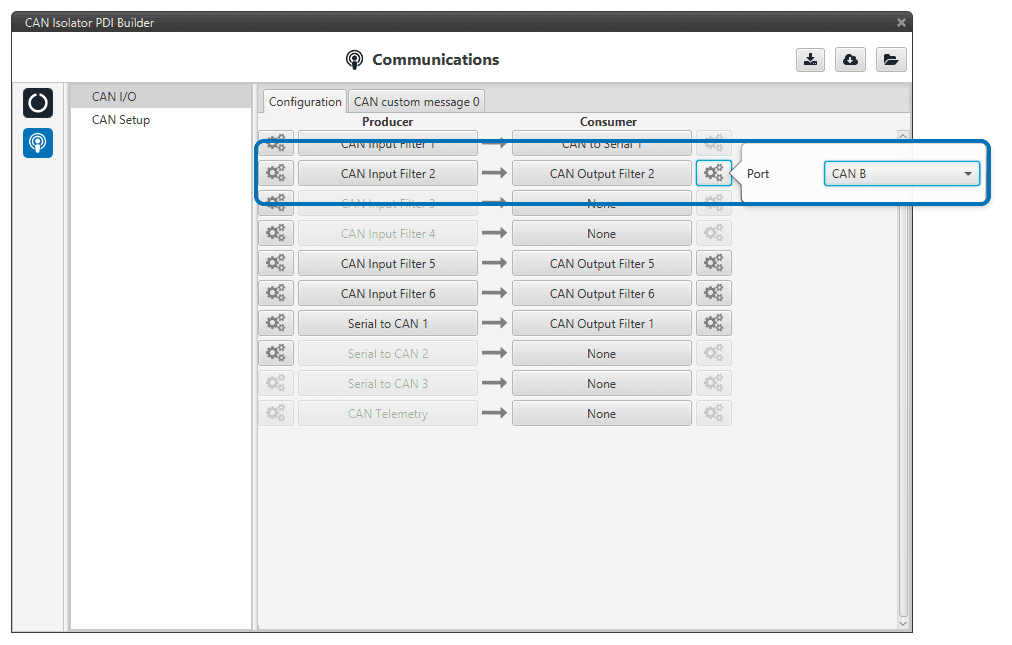
Configure CAN Input Filter 2 on CAN B, with the same settings as the Mailbox.
Bind CAN Output Filter 2 to CAN Input Filter 2, configured to CAN A.
Control the GPIO Outputs¶
In this example we will see how to control the GPIO Output pins on Smart CAN Isolator.
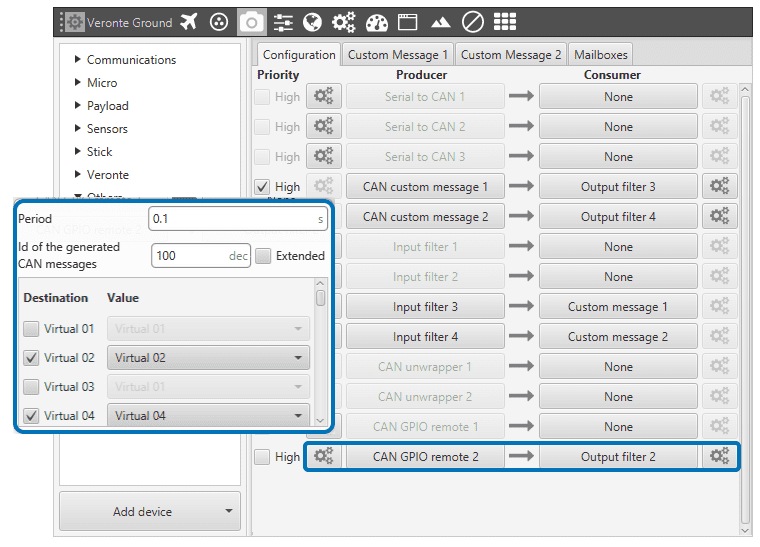
On Veronte, Configure CAN GPIO Remote and connect it to an Output Filter. We will need to command Virtual GPIOs 2 and 4. The CAN ID can be arbitrarily chosen. For this example, ID 100 will be used.
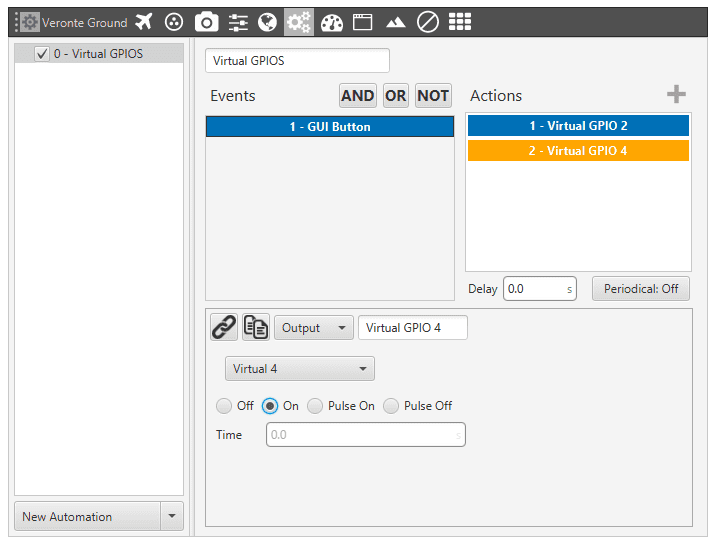
Use the action Output in Veronte, to control the Virtual GPIOs.
In Smart CAN Isolator, create a mailbox with ID 100 to receive the CAN message.
Configure a CAN Input Filter to accept the CAN message, and connect it to a CAN GPIO Consumer.
Send Internal Telemetry¶
In this example we will see how to create a custom CAN message to send internal information to other devices.
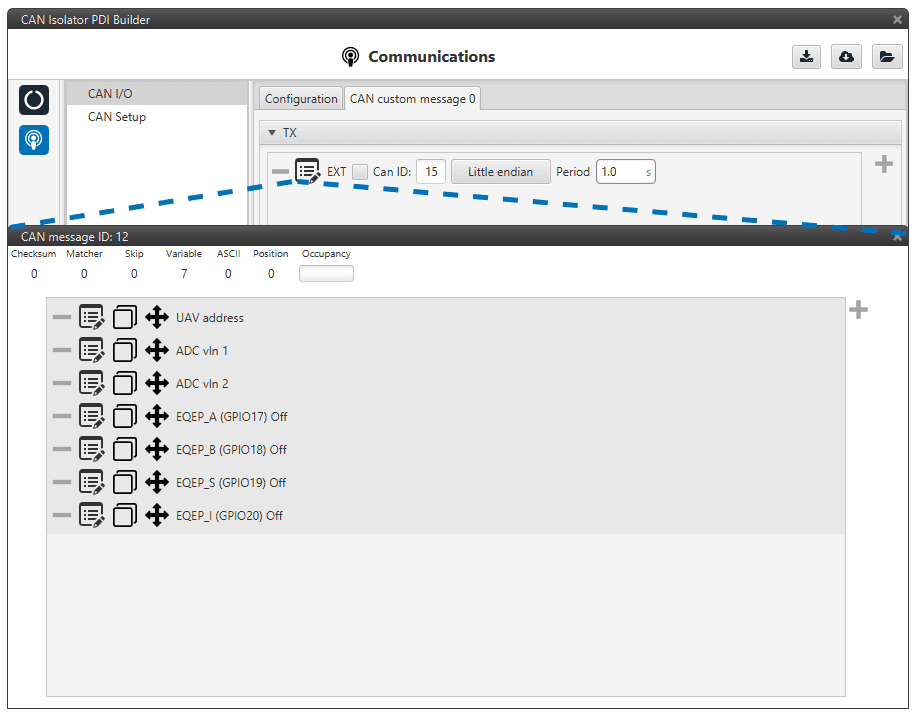
In CAN telemetry, create the CAN message, including any relevant variables. For this example, internal ID, power inputs and status of GPIOs will be sent. Only Data and ID need to be configured. Smart CAn Isolator will automatically build the rest of the message.
Connect the CAN Telemetry producer to an output filter, on the CAN Interface you want the information to be sent.
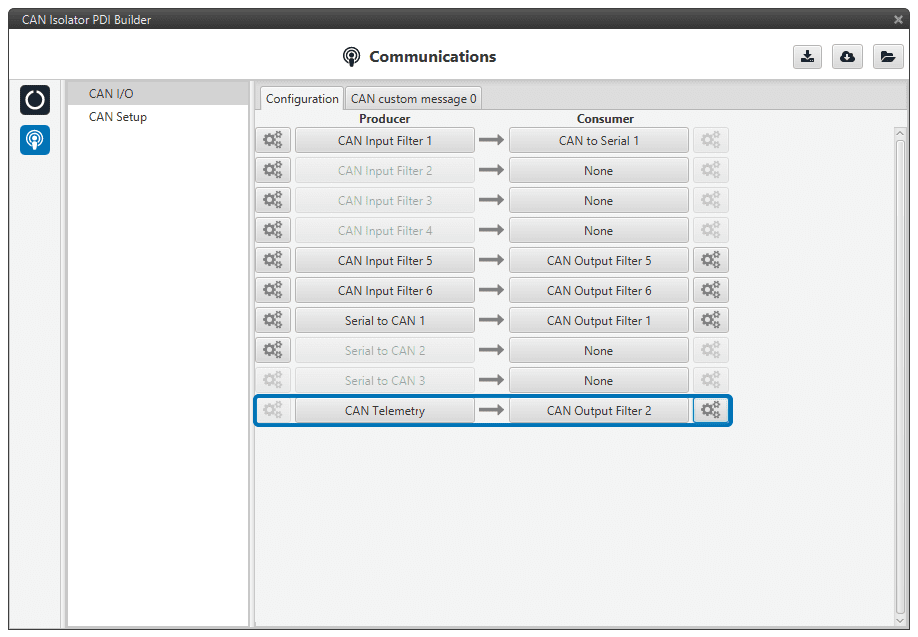
Now any device on the bus can read the information.